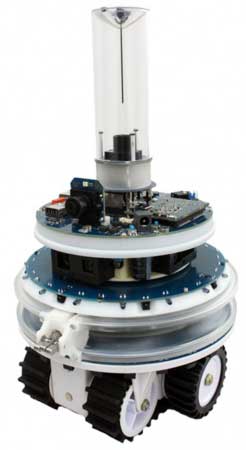
1 июня 2009 года известная всем компания Microsoft представила игровой контроллер для Xbox 360 — Kinect. В основу принципа этого проекта, который ранее назывался Project Natal, была положена концепция «контроллера без контроллера». Другими словами, если ранее между компьютером и человеком должен был быть некий посредник в виде манипулятора, например, мыши, клавиатуры и т.п., то сейчас от него можно вполне и отказаться, заменив все на систему распознавания голосовых команд, движений или изображений. Нужно сказать, что идея абсолютно не нова, достаточно вспомнить еще ранние 90-е, когда многие пытливые умы устанавливали на компьютер программу Dragon Dictate и пытались открывать и надиктовывать документы в Word. Системы распознавания движений также изучены довольно широко, используются во многих отраслях индустрии от 3D-анимации до обучения роботов. С изображениями тоже все вроде бы ясно.
Microsoft решила совместить все три области в одну, в результате у них и получился своего рода манипулятор без манипулятора. Устройство Kinect подразумевает единый блок, на борту которого имеется обычная RGB-камера, два датчика глубины, каждый из которых состоит из инфракрасного проектора, объединенного с CMOS-матрицей, и микрофон. Наличие именно двух датчиков глубины позволяют работать с 3D, то есть объемом. Сам по себе манипулятор многими пользователями сейчас воспринимается как экзотика, но уже долгое время не дает покоя «кулибиным» и экспериментаторам. Все возможности, которые могут открыться, пока не изучены, и типовым решением от Microsoft заинтересовалось в том числе и большое число серьезных исследователей, например, из Cornell University.
Опыты Cornell University
Исследователи решили применить Kinect для интеграции компьютерного интеллекта в быт человека. Так в июле этого года они провели серию практических опытов, в которых задействовали четырех человек, выполняющих 12 обычных бытовых операций (чистка зубов, приготовление пищи, питье воды, работа за компьютером и т.п.) в пяти различных помещениях (офис, кухня, спальня, ванная комната и гостиная). На базе этого разрабатывался общий алгоритмический шаблон распознавания действий. В результате, система может получить информацию о том, чем сейчас занимается человек, и если ему что-то трудно сделать, то помочь ему.
Изначально исследования могут показаться довольно интересными только с научной точки зрения, поскольку июльские результаты оказались далеко не идеальными. Ведь имеется много пробелов, например, с распознаванием в открытом или неисследованном пространстве. И как быть в случае недостаточного количества входной информации (человек виден не весь и т.п.)? Исследователи решили сделать дополнительное расширение алгоритма, взяв за основу тот факт, что определенные действия человека чаще всего всегда связаны с конкретными предметами. В рамках июльских исследований робот их не мог определять. Поэтому следующие опыты стали проецировать именно в область распознавания объектов, и в середине сентября уже были озвучены первые результаты. Все имеет прямое отношение и к основной части — распознаванию действий.
Опыты Cornell University: робот находит тарелку в сушке
Опыты Cornell University: робот находит компьютерную клавиатуру, исследуя помещение
Судя по последним публикациям, специально созданный робот стал определять и находить требуемые предметы в различных их положениях, даже для случаев когда часть информации недоступна (не видна). Сначала исследователи научили машину распознавать правильно расположенные на плоской поверхности обычные предметы: пластину, чашку, стакан мартини, тарелку, ложку, камертон, компьютерную клавиатуру. Точность их определения составила 98%. Затем стали экспериментировать с изменением положений предметов, и добились 95%-успешности их распознавания.
Нужно сказать, что нечто подобное проводилось в рамках соревнований по распознаванию предметов у роботов Willow Garage PR2 ( см. статью), финал которых прошел в мае этого года. Но в данном случае все было усложнено тем, что используется другой тип датчиков и при этом предметы расположены так, как и в реальности (или близко к ней). Например, тарелки сложены в сушилке и т.п.
В целом, исследователям предстоит еще довольно много поработать, но их труды не напрасны. Дело в том, что они отталкиваются от оснастки типового устройства (Microsoft Kinect), которое не дорого для конечного пользователя, будет удешевляться со временем, и, помимо всего прочего, может применяться в бытовых роботах. Как самый близкий вариант: роботы-дворецкие и роботы-сиделки.
Нужно отметить, что после известного мирового финансового кризиса вся отрасль переориентировалась больше на бюджетные недорогие решения. Так что разрабатываемые в рамках Cornell University технологии сейчас востребованы. Теперь продолжим обзор интересных новинок.
QinetiQ Dragon Runner 10
Известная компания QinetiQ North America сейчас активно занята созданием и усовершенствованием гусеничных платформ небольших наземных беспилотных роботов (SUGV — Small Unmanned Ground Vehicle) Dragon Runner, первая из которых была анонсирована еще в конце 2008 года. В начале осени 2011-го они представили на широкую аудиторию новую модель DR10. В данном случае мы говорим действительно о небольших размерах: длина — 38 см, ширина — 34 см, высота — 15 см, вес — 4,5 кг. Причем к DR10 применяется уже другой термин — наземные беспилотные микро-роботы (MUGV — Micro Unmanned Ground Vehicle). Машина может передвигаться со скоростью 6,4 км/ч, перенося на себе до 2,3 кг. С точки зрения оснастки все зависит от требуемой комплектации, и при этом есть совместимость с устройствами, сделанными для модели DR 20, среди которых имеются роботизированная рука, сенсоры, камеры и радиоуправление.

В целом, на подобного рода устройства всегда есть спрос у военных и спасательных служб. Но, если раньше конкуренция в области предложений была невелика, то сейчас перед разработчиками уже стоят задачи удешевления и расширения функциональности.
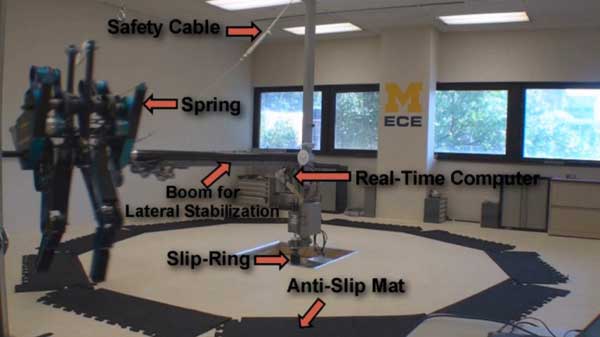
Самый быстрый бипед с коленями
Название подраздела может кого-то развеселить, но на самом деле, роботы-бипеды, то есть, те, которые передвигаются на двух ногах, могут быть различными по конструкции. Если мы говорим об андроидах, то есть, повторяющих движение человека, то это отдельный сегмент. В 2004-м году известный Honda Asimo показал скорость передвижения, сравнимую с человеческой при быстрой ходьбе, а именно, 6,8 км/ч. Между тем, исследователи из Мичиганского Университета под руководством профессора Jessy W. Grizzle нарастили этот параметр, и их модель MABEL уже фактически бегает, то есть способна передвигаться со скоростью 10,7 км/ч. При этом подразумеваются размеры, близкие к обычным человеческим. Данная модель ближе к реальности в силу более правильного распределения веса между туловищем и ногами. Сухожилия реализованы за счет специальных пружин. При этом достигнута более успешная эмуляция ходьбы. У ASIMO так называемая «воздушная фаза» (когда одна нога отрывается от земли, а вторая еще не наступила) составляет 10 процентов при каждом шаге, у MABEL — 40%. Что интересно, такая разница дает преимущество и при передвижении в рамках неровной поверхности.
Пока идет черед новых испытаний, стоит выделить и ключевые сферы применения, для которых может и, скорее всего, будет применяться MABEL. Это в первую очередь экзоскелеты и системы передвижения для инвалидов. Также разработчики намекнули и на новые системы доставки грузов.
Swarmanoid’ы — ТВ-звезды
Кого из роботов сейчас можно причислить к телезвездам? Asimo? Наверное, но не для 2011 года. Swarmanoid’ы — вот «кумиры» среди современных любителей роботов. На самом деле, это довольно удивительная разработка, связанная с коммукативной интеллектуальной системой, включающей машины различных типов и согласующей их действия. Вместе они могут выполнять сложные задачи. Всего Swarmanoid’ов три варианта:
- Eye-Bot — робот-вертолет, передвигается на четырех винтах. Имеет захват, для того чтобы прикрепляться к потолку.
- Hand-Bot — робот-захват, передвигается за счет рук-захватов по вертикальным поверхностям, ими же (руками) может брать предметы. Имеет еще один, выстреливающий вверх захват, чтобы прикрепиться к потолку.
- Foot-Bot — выполняет две служебные функции: робот-транспорт и робот-связист. В первом случае предназначен для доставки робота-захвата на место, во втором —обеспечивает связь. Передвигается на колесах.
На видео, продемонстрированном в рамках сентябрьской конференции AAAI 2011 Artificial Intelligence Conference) в Сан-Франциско, было показано, как Swarmanoid’ы выполняли сложную задачу — доставали с полки книгу.
Первым в дело вступил робот-вертолет Eye-Bot, который за счет камеры нашел необходимый объект (книгу на полке), прикрепился на потолке и отправил сигнал общей системе. Дальше та отправила еще робо-вертолеты, которые были расставлены в опорных точках маршрута, по которому должен транспортироваться робот-захват Hand-Bot (он и будет эту книгу доставать). По завершении этого этапа в дело вступили роботы-связисты, согласно полученным данным, они самостоятельно распределились по всему пути следования. Когда эта операция была проведена, два робота-транспорта подъехали к роботу-захвату, прикрепились к нему и отвезли в нужное место, ориентируясь на связистов. Затем уже, дело техники, тот взбирается по полке и достает книгу.
Нужно сказать, что подобного рода системы (а мы говорим о полноценной реализации на базе искусственного интеллекта) сейчас мало где демонстрируются в действии, они только разрабатываются, в том числе и у военных. В более-менее гражданском применении и в целях рекламы науки это показывается как «система колонизации Марса». На AAAI 2011 видео со Swarmanoid’ами является победителем. И, скорее всего, в ближайшем будущем оно обойдет все научные телеканалы мира. В интернете ролик уже очень популярен.
Перепечатка материалов или их фрагментов возможна только с согласия автора.
|