Среди ученых и изобретателей довольно часто встречается термин «робосапиенс», при этом мы говорим не о футурологии. В действительности, если рассматривать ситуацию в целом, то можно наблюдать определенного рода эволюцию, в рамках которой появляется множество видов и подвидов, часть из которых перерождается в более совершенные системы. При этом стоит выделить наиболее интересные направления, с которыми мы познакомили читателей, начиная с осени 2010 года, что сейчас и сделаем, а также расскажем о самых интересных новинках, актуальных к началу лета-2011. Разбор полетов.
Подводный патруль и транспорт
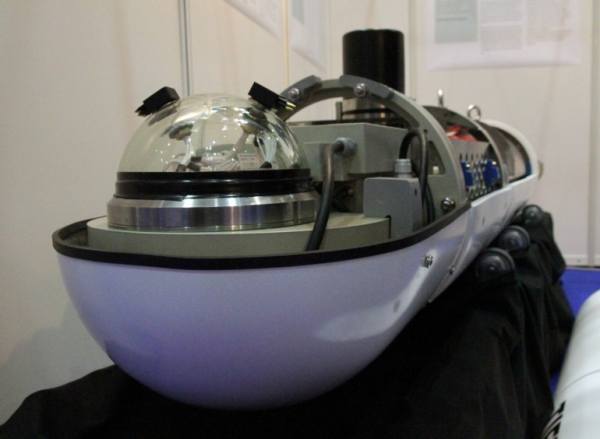
Не смотря на то, что соревнования по подводным беспилотным роботам уже давно не проводятся, тема остается актуальной. В частности, сейчас решаются такие насущные вопросы как автоматизированное патрулирование для проверки текущего состояния тех же дамб, бортов кораблей, подводных коммуникаций, где они имеются. В будущем планируется развить эту тему в сторону создания транспорта, который без прямого участия людей сможет перевозить грузы на больших глубинах.
Наиболее яркая разработка, о которой написало множество специализированных изданий, принадлежит инженерам из Fraunhofer Institute for Optronics, работающим под руководством доктора Томаса Раученбаха (Thomas Rauschenbach). Их подводный робот может работать на глубине 6 км, при этом его наделили весьма мощным искусственным интеллектом. Сейчас идут испытания.
Единая система управления
О единой системе управления множеством роботов говорили уже давно, хотя основные подвижки произошли в 2005-2006 гг., когда эта тема стала интересна военным. Так в США появился тогда стандарт JAUS (Joint Architecture for Unmanned Systems), который начал активно осваиваться. Например, на ведущих по технологическому уровню американских студенческих соревнованиях IGVC (Intelligence Ground Vehicles Competition), поддерживаемых крупнейшими военными ведомствами США, примерно в тот период был добавлен новый состязательный этап, связанный с интеграцией роботов в рамках JAUS.
На более профессиональном уровне следует отметить отдельное технологическое отклонение этого проекта — протокол QinetiQ CIP (Common Interface Protocol), который подразумевает, что отдельные независимые устройства и сабсистемы управляются с помощью схожих систем и команд из одной архитектуры. Другими словами, это подразумевает единую систему управления, подходящую для различных роботов.
Кстати, что интересно, нечто подобное в 2006-м предложила и другая американская фирма iRobot, которая также занимается созданием роботов для военных и спасательных операций. Наиболее известная серия моделей от них в этом сегменте — PackBot. Система, предложенная iRobot, называется Sentinel и позволяет управлять сразу множеством роботов. В общем, для периода 2005-2006 гг. было характерно, что в одной и той же теме одновременно шло множество разработок.
Система управления множеством PackBot’ов от iRobot — Sentinel
Также стоит отметить и проект MAST (U.S. Army's Micro Autonomous Systems and Technology), который стартовал в 2003 году и привлек крупнейшие лаборатории университетов США. Сначала все выглядело достаточно футуристично, потому как в некоторых СМИ начали говорить о различных роботах-насекомых с единой системой управления. В принципе, это было не так далеко от истины, только в место роботов-насекомых изобретаются различные мини-роботы с разными способами передвижения. А управляются они по единому протоколу. В целом, ситуация постепенно движется вперед.
При этом стоит отметить уже три направления развития роботов: - Дистанционно управляемые.
- Автономные беспилотные, не предусматривающие внешнего управления.
- Дистанционно управляемые некоей единой системой (автономной компьютерной, либо с некоторым участием человека-оператора).
Стоит напомнить, что если в 2000-2006 гг. американцы делали множество исследований, и, кстати, весьма удачных, в области автономных беспилотников, европейские производители от этой идеи тогда отказались. На это было несколько причин, главные из которых: длительный срок разработки и высокая стоимость. И тогда в Германии были проведены одни из самых значимых для 2000-х соревнования Elrob 2006, привлекшие крупнейших европейских производителей и показавшие множество дистанционно управляемой военной робототехники. С другой стороны можно сказать, что и само дистанционное управление можно компьютеризировать. То есть, существенных проблем в переходе от одной нише к другой нет.
В целом, в ближайшее время должно произойти смешивание технологий, а именно, роботы будут включать автономную часть, в рамках которой будут самостоятельно решать определенные «личные» задачи, например, перемещения по пересеченной местности и преодоления препятствий, а более важные решения (указывание целей, составление маршрутов и т.п.) будут передаваться с центра управления.
Пользовательские робототехнические системы
Эта тема была очень популярна вплоть до наступления мирового финансового кризиса. Все активно восхищались умными пылесосами iRobot Roomba, робо-собаками Sony Aibo. В январе 2008 даже были озвучены оптимистические прогнозные данные ABI Research, в которых приводилась конкретная цифра, а именно, суммарный рынок пользовательской робототехники к 2015 году составит $15 млрд.
Вместе с тем, во время кризиса, а также сразу после него индустрия в области дорогих разработок свернулась. Причем стоит отметить, что и до этого некоторые компании, такие как, например, Sony, закрыли свои робототехнические подразделения в силу их плохой окупаемости, а точнее, ее отсутствия.
Дело в том, что все более-менее серьезные системы оказывались в итоге дорогими для пользовательского кошелька, и вряд ли можно найти много людей, способных заплатить за дорогую игрушку, пусть и наделенную развитым интеллектом, несколько десятков, а то и сотен тысяч долларов.
Хотя в более-менее бюджетном диапазоне (до $1000) спада практически не наблюдалось. А весной-2011 появилась очень интересная новинка от RoboDynamics — бюджетный робот Luna, который по интеллекту и возможностям уже не игрушка, а скорее многофункциональный робот-помощник, при этом, естественно, возможен дальнейший апгрейд программной части для расширения функционала. Сегодняшняя цена на Luna составляет $3000, а в ближайшем будущем ее планируется снизить до $1000.
RoboDynamics Luna
Что интересно, эмоции робот выражает на небольшом 8-дюймовом сенсорном экране, что очень напоминает фильм Данкана Джонса «Moon» (в русскоязычном варианте почему-то названном «Луна 2112»).
Многозадачные роботы для учебных заведений
Вместе с тем в области дорогой робототехники развилось отдельное направление, а именно, роботы для учебных заведений, на базе которых студентам можно оттачивать свои навыки программирования. С точки зрения оснастки предлагается весь современный арсенал, включая полный спектр датчиков, в большинстве случаев руки с захватами вместо кистей и так далее. Стоимость таких решений велика, например, один из самых расручиваемых на сегодня робот PR2 стоит $400 тыс. Впрочем, его разработчики из калифорнийской компании Willow Garage (www.willowgarage.com) повели себя весьма показательно. Конечно, выложить такую сумму могут далеко не все, но оттачивать мастерство можно и удаленно. Другими словами, к программированию PR2 может подключиться любой человек, для чего нужно просто войти в интернет-сообщество на сайте фирмы. Даются все исходные коды, а также есть много полезных обсуждений. Специально для удаленных разработчиков компания недавно проводило соревнование по лучшему алгоритму распознавания образов с ценными призами.
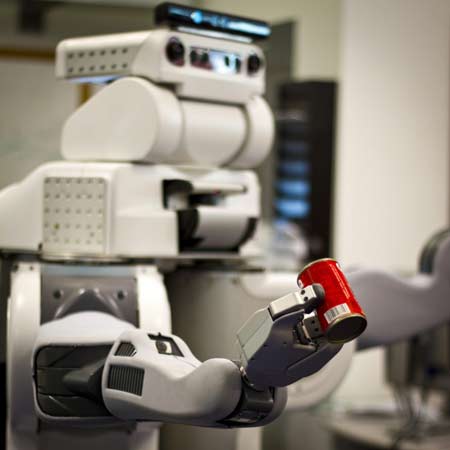 Willow Garage PR2 распознает образы, берет нужные предметы
PR2 показателен и тем, что этот робот многозадачен, то есть, что в него запрограммируют, то он и будет делать. Причем сейчас помимо интернет-сообщества, к усовершенствованию программной части подключились специалисты из MIT, а именно, ученые Leslie Kaelbling и Tomas Lozano-Perez. Одна из ключевых целей, которую они поставили в рамках своего участия, довольно интересна, а именно, обучение робота разделять решение сложной задачи на несколько более простых. Другими словами — планирование.
Среди конкурирующих систем можно отметить немецкого pi4-workerbot, разработанного группой специалистов из группа из института Фраунхофера Fraunhofer Institute for Production Systems and Design Technology IPK. Он также рассчитан на поставку в вузы для обучения студентов современным технологиям на практике.
Экзо-скелеты
Буквально с осени прошлого года активизировалась ниша экзоскелетов. Основная заслуга прогресса в этой области принадлежит военной программе агентства DARPA «Exoskeletons for Human Performance Augmentation», которая стартовала в 2000-м году, и на ее реализацию было выделено $50 млн. К разработкам и освоению этих средств было привлечено несколько серьезных компаний, и в 2010 году можно уже было говорить о двух успешных решениях от фирм Raytheon (их серия называется XOS) и Lockheed Martin (их серия называется HULC (сокращение от Human Universal Load Carrier) MK).
Экзоскелет Raytheon XOS 2
Экзоскелет Lockheed Martin HULC MK II
Оба варианта базируются на изобретении Berkeley Lower Extremity Exoskeleton (BLEEX), сделанном лабораторией Беркли (UC Berkeley's Robotics and Human Engineering Laboratory), но при этом имеют некоторые концептуальные и функциональные различия. Например, HULC MK II является многокомпонентным, то есть, вы выбираете/подключаете определенные блоки в зависимости от планируемой задачи.
Новинка — язык роботов
Вообще, то, что сделали австралийцы, а именно, Рут Шульц (Ruth Schulz) и ее коллеги из университета Квинсленда, не то, что занимательно, а восхитительно. Представьте себе робота, который ездит в рамках определенного периметра, распознает предметы и за отсутствием базы знаний, просто дает им, а также областям, направлениям и расстояниям свои названия, применяя слоги, сопоставленные в случайном режиме. Эти данные передаются другому роботу, в результате чего тот начинает понимать все также. И в результате создается некая общая база знаний с собственным лингвистическим запасом.
Испытания проводятся в рамках проекта «Лингодроиды» (Lingodroids). Причем, все построено довольно интересно в игровой манере. Роботы, оснащенные лазерными дальномерами, сонарами и камерами исследовали определенные участки периметра, а информацией между собой делились при встрече, при этом не путем радиосвязи, а просто произнося слова. Также решены вопросы сопоставления словарей и так далее. Очень интересный опыт отображен в отчете с недавней конференции по робототехнике в Шанхае. Его скачать можно по этой ссылке — http://itee.uq.edu.au/~ruth/schulz-etal-ICRA2011.pdf.
Новинка — трехколесники и трехпалые
Вообще, в последнее время можно наблюдать очень интересную тенденцию в робототехнике, а именно, началось появляться все больше устройств, базирующихся на трех колесах или других подобных решениях. В плане устойчивости и способности преодоления препятствий они не сильно уступают четырехколесным вариантам. Причем наиболее интересных среди новинок в этой области следует выделить опять же три:).
Первая. В лаборатории профессора Сигэо Хиросэ (Shigeo Hirose) Токийского технологического института в рамках совместной работы с Японским космическим агентством (JAXA) был создан трехколесный луноход Tri-Star IV. Система передвижения довольно необычна. Два из трех колес удерживаются на специальных рычагах, вследствие чего можно менять их расположение.
Второе ноу-хау — это сама конструкция колес. Они выполнены из листового металла, облачены в высокопрочную ткань, при этом на самой поверхности соприкосновения с землей имеются зубчатые металлические вставки, идея использования которых довольно близка с ластовидными (flapper) колесами от Macroswiss, о которых мы когда-то давно писали.
Ластовидные колеса Macroswiss
В целом повышается параметр проходимости в рамках неровных поверхностей. Японские разработчики сказали, что их колеса по тому же параметру проходимости близки к гусеничным механизмам. Этому можно верить. В целом, хоть мы говорим о космической разработке, японцев сейчас волнует несколько другое, поэтому Tri-Star IV в первую очередь планируется применять для инспекций на «Фукусиме-1».
Вторая. Американская компания ReconRobotics представила интересного трехколесника Recon Scout Throwbot. По существу они пока реализовали только саму базу, на которую можно разместить различные типы устройств, например, видеокамеры. Отличительной особенностью данного решения является то, что колеса намагничены, и, соответственно, робот может легко перемещаться по вертикальным металлическим поверхностям.
Основное предназначение, как бы это странно не прозвучало — помощь в борьбе с пиратами. Recon Scout Throwbot может перемещаться по бортам любого судна. Фирма уже подписала соглашение с ВМС США по развитию данного проекта. А в целом стоит отметить, что мы говорим сейчас только об одной из разновидностей реализаций — с намагниченными колесами. У фирмы есть и другие варианты, где колеса сделаны со специальными крюковидными захватами или просто имеют рифленую поверхность.
И третья, наиболее интересная. Инженер Тим Лексен (Tim Lexen) из Висконсина создал дистанционно управляемого робота с уникальной системой передвижения на трех стальных спиралях. Соответственно имеется и три сервомотора.
Робот показывает просто удивительные параметры проходимости, справляясь с неровностями натурального ландшафта и на данный момент его разработчик не собирается останавливаться на достигнутом, поставив перед собой задачу улучшения ситуации с вертикальными препятствиями. В целом стоит отметить, что данный способ передвижения (на спиралях) не нов и был предложен еще во второй половине позапрошлого века. В этом плане также можно вспомнить очень интересную советскую машину ЗИЛ 4904 (разработана в 1970-х), которая передвигалась на двух параллельных спиралях и была предназначена для перемещений в рамках труднопроходимой местности (леса и т.п.).
А это тот самый ЗИЛ 4909 (1970-е), передвигающийся на двух параллельных спиралях
Кстати, подобные решения некоторые конструкторы даже сейчас серьезно рассматривают для той же сельскохозяйственной техники. А вариант от Тима Лексена может быть интересен для многих сфер, в том числе и космической.
Подытожим
Положительная динамика в роботостроении, которая проявилась в последнее время, не может не радовать. При этом стоит отметить, что фактически все изобретения несут в себе практический смысл. Это не сравнить с ситуацией в начале 2000-х, когда очень много разработок носили либо имиджевый характер, либо рейтинговый (демонстрировали что-то футуристическое, которое в итоге не было реализовано). Сейчас индустрия конкретно переориентирована на извлечение прибыли, а также создания надежных заделов на будущее, как мы можем это увидеть в рамках проекта PR2. В целом, робот в общественном понимании еще не стал социально значимой единицей, но при этом в ряде сегментов оттеснил человека, а где-то и просто заменил.
Перепечатка материалов или их фрагментов возможна только с согласия автора.
|